Wereldwijd toonaangevend chirurgisch centrum voor epilepsie in Milaan gebruikt stereotactische robot van Renishaw
De neurochirurgen van het Claudio Munari chirurgisch centrum voor epilepsie en parkinson van het Niguarda ziekenhuis in Milaan, Italië, gebruiken het Renishaw neuromate® stereotactische systeem bij stereo-elektro-encefalografie (SEEG) om de epileptogene zone te definiëren. Het team rapporteert een hogere nauwkeurigheid en een kortere operatietijd, met een zeer laag percentage complicaties.
Inleiding
Dr. Francesco Cardinale, een van de neurochirurgen van het Niguarda ziekenhuis, vertelt gepassioneerd over zijn robotische stereotactietechniek, gebaseerd op de klassieke methodologie van Talairach. "Chirurgie werd lange tijd gezien als laatste behandelmogelijkheid nadat patiënten vele jaren zonder succes tests met combinaties van anti-epileptische medicaties hadden ondergaan", legt Cardinale uit. "Maar als van twee medicijnen vastgesteld is dat ze niet effectief zijn of niet verdragen worden, dan is de kans dat een derde medicijn wél effectief is minder dan 5%1. Inmiddels is chirurgie in willekeurige gecontroleerde klinische experimenten superieur gebleken aan medische therapie wat betreft klinische en psychosociale resultaten2,3, om nog maar niet te spreken over de economische en sociale gevolgen van levenslang moeten omgaan met een ernstige beperking. Is het niet tijd dat chirurgie al vroeg een alternatief wordt, speciaal voor jonge kinderen die niet naar tevredenheid reageren op een of twee anti-epileptische medicijnen?”
Voor vele patiënten met epilepsie zijn intracerebrale opnamen nodig om de epileptogene zone (EZ) te definiëren. Stereo-elektro-encefalografie (SEEG) is een procedure om opname-elektrodes direct in hersenstructuren te plaatsen, met een op de patiënt afgestemde exploratiestrategie op basis van niet-invasieve studies.
Tijdens SEEG worden tot 20 elektrodes diep in de hersenen ingebracht, elke met tot 18 elektrische contacten over zijn lengte, die elektrofysiologische opnamen leveren van een ongeëvenaarde ruimtelijke dichtheid en nauwkeurigheid. Een retrospectieve evaluatie van 81 elektrode-implantatieprocedures, die uitgevoerd waren met de neuromate robot en frames voor de patiëntregistratie, lieten een mediane toepassingsnauwkeurigheid zien van 0,78 mm op het corticale ingangspunt, de meest riskante zone van het traject4. Deze uitstekende nauwkeurigheidscijfers werden verder aangevuld door de introductie van het neurolocate registratiesystem5.
Preoperatieve planning
Dr. Cardinale co-registreert een combinatie van meerdere datasets voor afbeeldingen. 3D rotationele angiografie levert bot- en vaatstructuren in een hoge resolutie, terwijl verschillende manieren van afbeeldingen maken met magnetische resonantie (MRI) parenchymstructuren in beeld brengen. De chirurg stelt het operatieplan vast om de elektrodes in te brengen zonder vaten te raken. Deze stappen van afbeeldingen en plannen maken worden ruim voor de operatie uitgevoerd.

Dr. Cardinale gebruikt de neuromate robot tijdens een SEEG-procedure
Chirurgie werd lange tijd gezien als laatste behandelmogelijkheid nadat patiënten vele jaren zonder succes tests met combinaties van anti-epileptische medicaties hadden ondergaan. Maar als van twee medicijnen vastgesteld is dat ze niet effectief zijn of niet verdragen worden, dan is de kans dat een derde medicijn wél effectief is minder dan 5%1. Is het niet tijd dat chirurgie al vroeg een alternatief wordt, speciaal voor jonge kinderen die niet naar tevredenheid reageren op een of twee anti-epileptische medicijnen?”
Claudio Munari chirurgisch centrum voor epilepsie en parkinson
Operatieve procedure
Op de dag van de operatie wordt het hoofd van de geheel onder narcose gebrachte patiënt in de hoofdhouder geplaatst, die bevestigd is op de voet van de neuromate robot. Het O-arm® apparaat voor intraoperatieve beelden wordt in positie gebracht rond het hoofd van de patiënt.
In beeldgeleide robotische chirurgie heeft de patiëntregistratie een sleutelrol in de procedurenauwkeurigheid. Dr. Cardinale en zijn collega's maken gebruik van het neurolocate frameloze registratiesysteem. De neurolocate module heeft geen verankering aan huid of bot voor referenties nodig, en maakt het mogelijk om intraoperatieve registratie uit te voeren met mobiele röntgen of computertomografie (CT) zoals de Medtronic O-arm biedt. De technologie van de neurolocate is gebaseerd op een referentiemarkering die gemonteerd is op de robotarm tijdens intraoperatieve röntgen of CT. Dr. Cardinale had een essentiële rol in de ontwikkeling van het systeem. Het team in Milaan kon aantonen dat registratie met de neurolocate minstens dezelfde nauwkeurigheid kan opleveren als de voorheen gebruikte methode met een frame, maar dan met het extra voordeel van een comfortabele, niet-invasieve en gemakkelijk te volgen werkwijze. Met de neurolocate module is een mediane toepassingsnauwkeurigheid op het corticale ingangspunt gerapporteerd van 0,59 mm5.
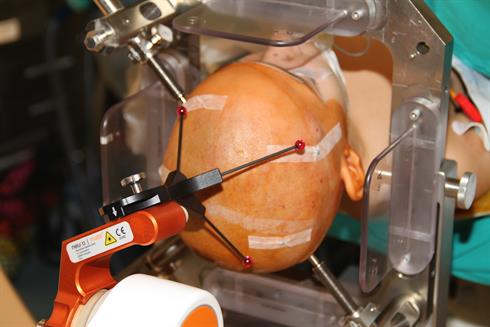 Patiëntregistratie met de neurolocate module
Patiëntregistratie met de neurolocate module
De neuromate robot maakt het mogelijk de gereedschaphouder nauwkeurig te positioneren over het vooraf geplande traject, op een gespecificeerde afstand van de schedel van de patiënt en het cerebrale doel. De chirurg boort percutaan tot aan een diepte die overeenkomt met het binnenoppervlak van de schedel. Een monopolaire coagulator wordt gebruikt om de dura mater te coaguleren. De chirurg bevestigt met behulp van de robot een holle geleideschroef in het boorgat, zodat uitlijning met het geplande traject gegarandeerd is. Daarna wordt de robotarm in positie gebracht voor plaatsing van de volgende schroef.
In de tweede fase van de operatie positioneert de chirurg SEEG-elektrodes via de geleideschroeven. Eerst wordt een starre stilet ingebracht en aangetrokken om een kanaal te creëren. Daarna wordt de halfstarre elektrode ingevoerd. Er bestaan diverse modellen elektrodes, in vele lengtes en aantallen contacten. Dit gehele proces vindt plaats onder controle van 2D röntgen met de O-arm.

De neuromate robot positioneert de boorgeleider.
Postoperatieve zorg
Onmiddellijk na de stereotactische elektrode-implantatie voert het operatieteam postoperatieve controles uit via een 3D scan met de O-arm. Co-registratie met de preoperatieve MRI levert precieze informatie over de locatie van ieder contact op de SEEG-elektrodes. Dan wordt getest of de elektrodes goed werken; een elektrode met een defect wordt meteen vervangen.
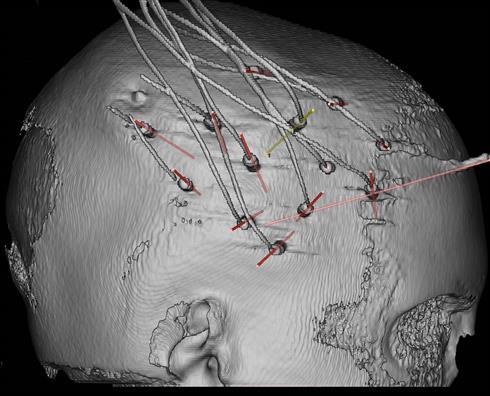
Elektrodes in situ, zoals gevisualiseerd door software voor chirurgische planning
De patiënt wordt later overgebracht naar een ruimte voor bewaking met video-EEG en blijft gedurende vijf tot vijftien dagen onder voortdurende observatie. Video en elektrofysiologische bewakingssystemen nemen diverse aanvallen op, totdat de oorsprong en het verspreidingspatroon van de aanvallen naar tevredenheid bepaald konden worden. De elektrofysiologen voeren ook elektrische stimulaties uit via de geïmplanteerde elektrodes, om de definitie van de EZ aan te vullen en voor hersenkartering. De meeste patiënten die SEEG-procedures ondergaan, worden vervolgens operatief behandeld. Vaak gaat dit om specifieke microchirurgische resecties om de epileptogene zone te verwijderen onder neuronavigatie op MRI-basis.
Discussie
Aangezien de hersenen en zeker het corticale oppervlak een hoge dichtheid van bloedvaten hebben, zijn planning met afbeeldingen en een precieze implantatie op basis van nauwkeurige visualisatie van de vaten essentieel. Het stabiele neuromate robotische platform, gestuurd door de chirurg via geavanceerde software voor chirurgische planning, leidt tot een veel efficiëntere techniek voor de verwerking van meerdere SEEG-elektrodes.
Het totale percentage complicaties in verband met SEEG werd gerapporteerd als significant lager in vergelijking met de percentages complicaties bij andere invasieve bewakingstechnieken6. Dr. Cardinale schrijft dit toe aan de zorgvuldige planning, afgestemd op elke patiënt op basis van neurobeelden in hoge resolutie, en aan de geweldige geometrische nauwkeurigheid van de neuromate robot. Het zeer lage infectiepercentage verklaart hij uit de minimaal invasieve percutane benadering.
In een recent gepubliceerde7 retrospectieve studie van 742 in het Niguarda ziekenhuis uitgevoerde SEEG-procedures stelde het neurochirurgische team vast dat “sinds de introductie van de (neuromate) werkwijze geen intracraniële bloedingen van belang zijn voorgekomen, waaruit blijkt dat nieuwe technologieën en een grondige aanpak deze invasieve procedure nog veiliger dan in het verleden hebben gemaakt.”
Referenties
(1) Kwan P, Brodie MJ. Early identification of refractory epilepsy. N. Engl. J. Med. 2000;342(5):314-9.
(2) Dwivedi R et al. Surgery for Drug-Resistant Epilepsy.Children. N. Engl. J. Med. 2017;377:1639–1647.
(3) Wiebe S et al. A randomized controlled trial of surgery for temporal-lobe epilepsy. The New England journal of medicine. 2001;345(5):311-318.
(4) Cardinale F et al. Stereoelectroencephalography: Surgical Methodology, Safety, and Stereotactic Application Accuracy in 500 Procedures. Neurosurgery 2013;72(3):353-366.
(5) Cardinale F et al. A new tool for touch-free patient registration for robot-assisted intracranial surgery: application accuracy from a phantom study and a retrospective surgical series. Neurosurg Focus 2017;42(5):E8
(6) Cossu M, Cardinale F. SEEG has the lowest rate of complications. Letter to the editor; J Neurosurg Volume 122, February 2015
(7) Cardinale F et al. Stereoelectroencephalography: retrospective analysis of 742 procedures in a single centre. Brain 2019;142:2688-2704

